
12月4日至9日,IEEE机器人学与仿生学国际会议(简称IEEE-ROBIO)在泰国举办。本次会议由IEEE机器人与自动化学会主办,是机器人和仿生学领域的重要国际会议,展示了机器人学与仿生学领域最前沿的研究成果,吸引了来自世界各地近500名研究人员参会。广东省科学院智能制造研究所机器人技术团队与香港大学计算机系副教授潘佳团队合作完成的论文"Vision-based Defects Detection and Interactive Impedance Control in Robotic Automated Layup Tasks"荣获了IEEE ROBIO T. J. Tarn 机器人学最佳论文奖(T. J. Tarn Best Paper Award in Robotics),省科学院智能制造所博士吴鸿敏为论文通讯作者。

获奖证书
省科学院智能制造所机器人团队与香港大学潘佳团队围绕当前机器人领域的研究热点开展联合攻关,在易形变物体,如碳纤维预浸料和纺织布料的机器人自动化铺放技术领域实现突破,成功构建了一种融合视觉缺陷检测和交互式阻抗控制的机器人自动化铺放方法框架,极大地提升了铺放效率和质量。
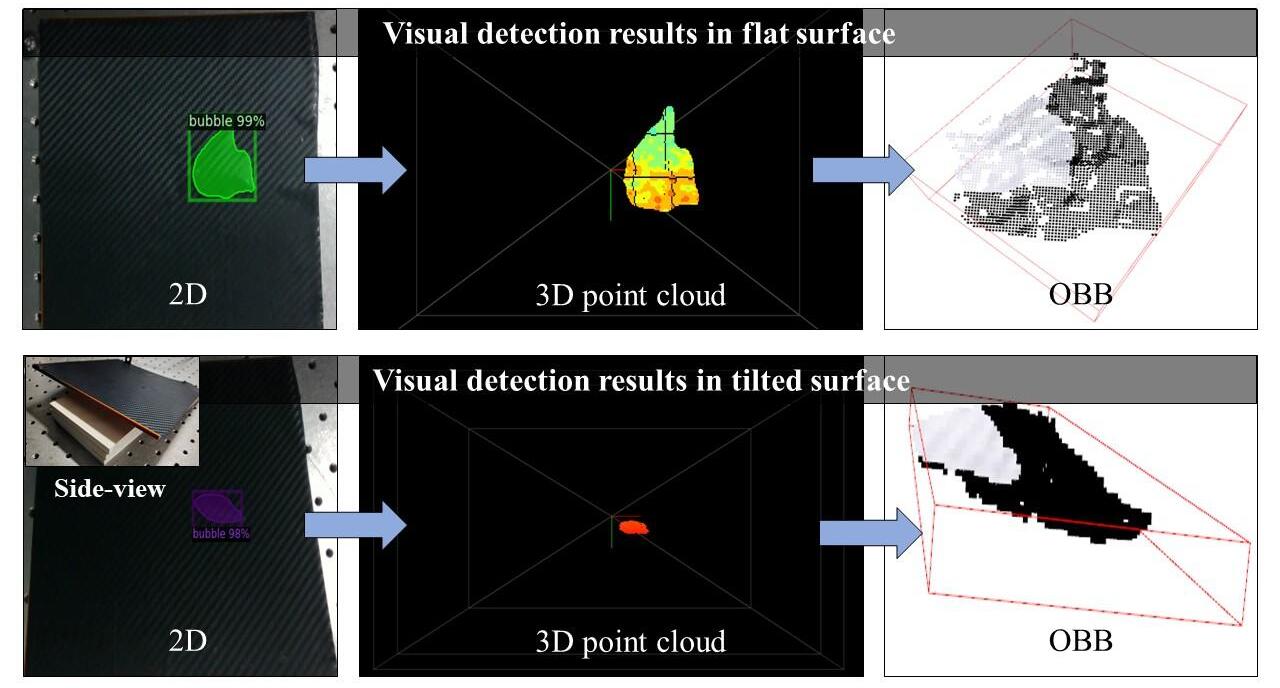
视觉感知的铺放缺陷检测与位姿估计
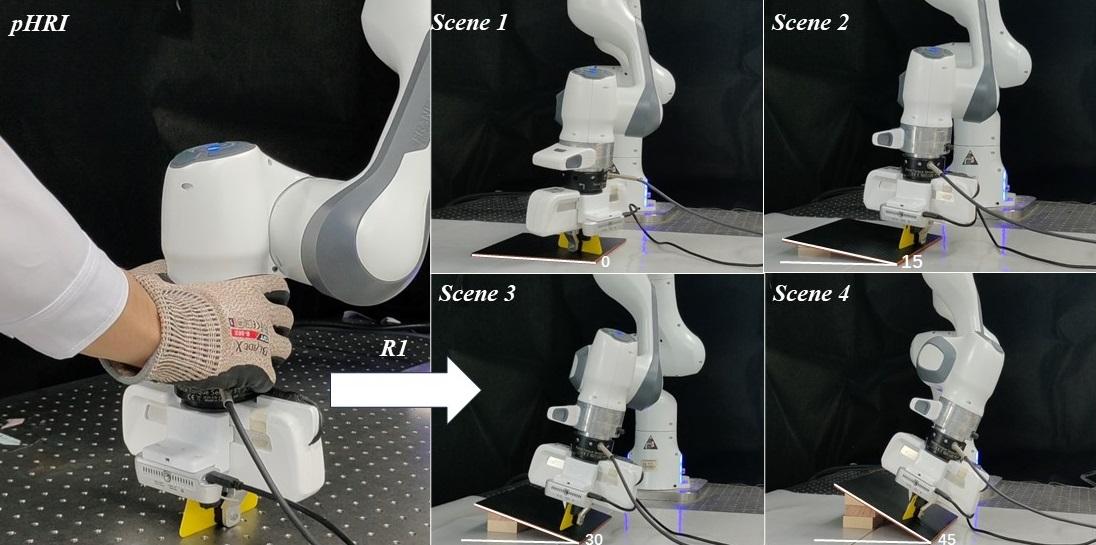
不同场景下机器人自动化铺放作业
供稿:省科学院智能制造所
撰稿:吴鸿敏
审稿:董军 范清 周雪峰
校稿:徐超 章震 黄巧纯
原文链接:https://www.gdas.gd.cn/kydt/t49416.html

